極座標での運動方程式
物理学ではどのような座標で運動を考えてもよい。
それは、軸、
軸、
軸から考える座標系(これはデカルト座標と呼ばれる)だけではなく、原点からの距離と方向によって位置が示されるような極座標系や、その他の基準を元に位置を指示するようなものでも運動を記述できるということである。
その極座標というのは、実際に物理学では非常によく使用される。
というのも、万有引力やクーロン力など、ある点を中心に距離のみに依存するような力の及ぼし方をする現象というのは物理学の世界ではよく見られるのである。
そのような力やエネルギーを考える場合には、デカルト座標で考えるよりも、極座標で考えた方が都合が良い。
さて、極座標を考えると言っても、考えるべき現象が平面のみで充分な場合と立体的に考える必要がある場合があり、それぞれ二次元極座標、三次元極座標などと呼ばれる。
これらを考えていく。
二次元極座標では、下の図のように、考えたい点(以下では単に「点」と呼ぶ)と原点を線分で結び、デカルト座標と重ねたときに線分と軸の角度を
、線分の長さを
として、これらを用いて座標を表現する。
と
の関係は、
である。

この座標系では、 原点から点へ向かう方向(方向)の単位ベクトルを
、それと垂直で
が増える方向(
方向)の単位ベクトルを
とおく。
これらのデカルト座標系の単位ベクトル との関係は
となる。
さて、これらを念頭に置いて、二次元極座標での運動方程式を立てることを考える。
任意の位置ベクトル は、
と表される。
これを用いると、運動方程式は
となる。
では、はどのように表されるのだろうか。
極座標の単位ベクトルは座標によって向きが変化するから、 だけでなく
も微分する必要がある。
を
で表したものを用いると
これらから、
となる。ちなみに、 の二階微分は
とも変形できる。
以上の結果から、 とおけば、
方向と
方向の運動方程式はそれぞれ
として表されるのである。
この座標系は、振り子の運動を考えるときや惑星の公転を考えるときなどに活用されることが多い。
余談だが、円筒座標と呼ばれる、二次元極座標に軸を加えた、
方向に筒状に伸びるような座標を考えることもある。
これは棒状の物体に一様分布した電荷による電場を考えるときなどによく使う座標系だが、この場合には、二次元極座標に軸をそのまま付け加えただけの運動方程式を立てれば良い。
次に三次元極座標だが、これも考え方自体は二次元極座標のときと大きくは変わらない。
ただ、計算過程が非常に複雑になるというだけである。
下の図のように、点と原点を線分で結び、その長さを 、線分と
軸がなす角を
、点を
平面に落とした点を原点と結んだ時に、その直線が
軸となす角を
とおく。
よって、以下の関係が成り立つ。
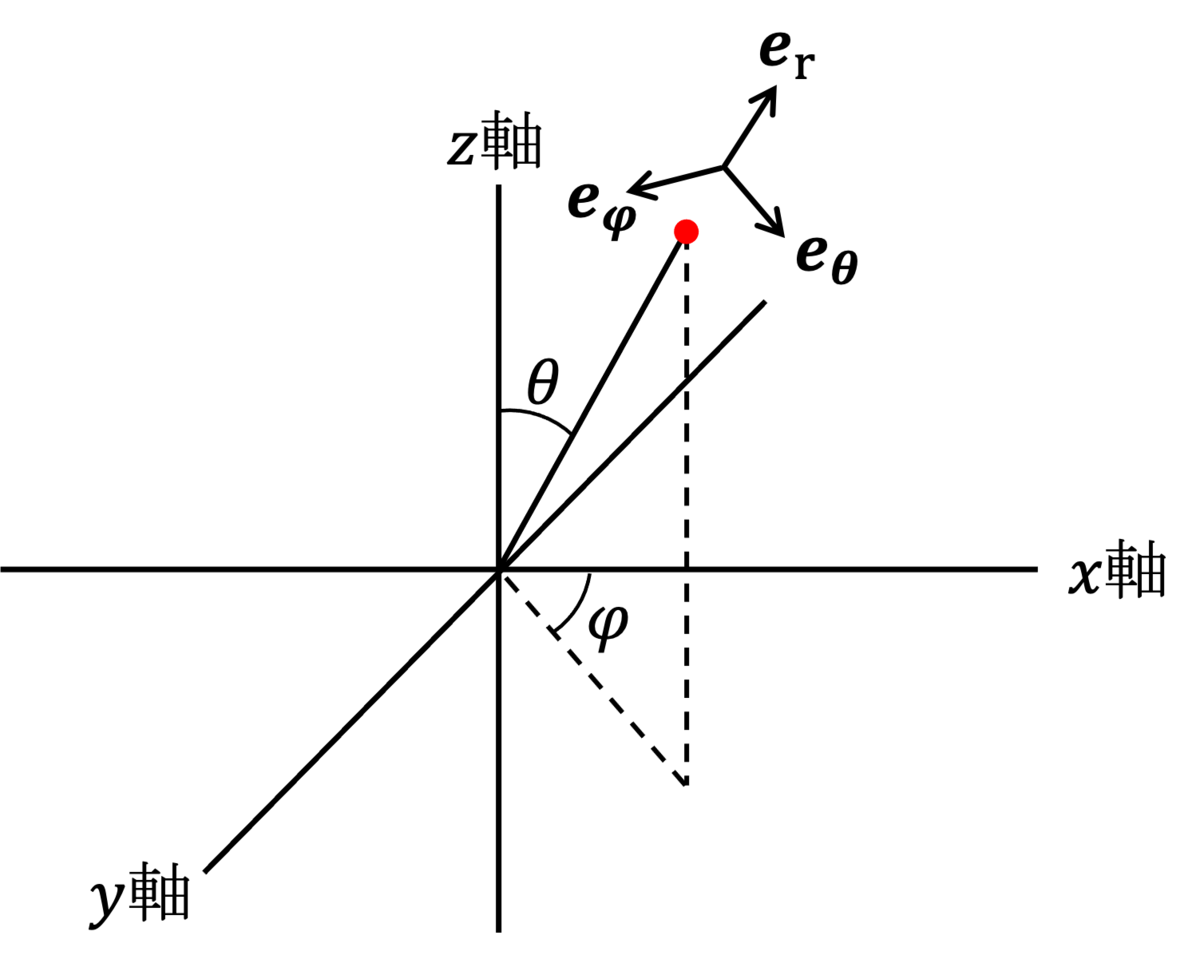
また、3つの単位ベクトル は、それぞれ
が増加する方向にとり、
となる。
ここから二次元極座標のときと同様にして
となる。
この運動方程式について、で一定となる場合を考えてみてほしい。
先に考えた二次元極座標の運動方程式と一致するのが確認できたと思う。
それぞれがどのような座標かをよく考えてみれば、このような対応関係が必然のものであると理解できるだろう。